共定位分析 (Colocalization)
共定位分析功能是多维、多萤光通道显微图像中最常用的分析功能之一。 Huygens Professional 及 Essential 软件能为您提供这个重要的分析功能,Huygens 软件能为您的多维图像(包括时间序列)的萤光通道之间的相互重叠的关系作出定量的分析。
Huygens 软件为您提供以下九个不同的共定位相关系数:
- Pearson , Object Pearson
- Spearman, Object Spearman
- Overlap,
- Manders M1,2 及 K1,2
- Global intersection coefficient
- Per-channel i1 and i2 intersection coefficients 的相关系数
共定位的定义及简单背景:
共定位是用来介定两个萤光通道之间重叠的相互关系,这个关系常用于细胞生物学、神经科学等项目中。例如:某一蛋白质在细胞中那一个细胞器中表达出来,这个蛋白质在正常细胞及病理细胞表达的差异,进行量化,于是数据、结果可以作出比较、进行有系统的分析。
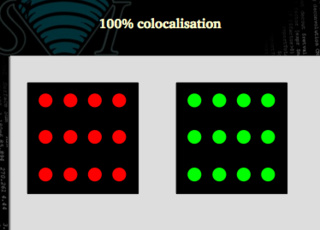
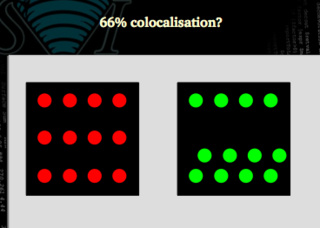
以下例子我们假设一个萤光通道为 R (红色) ,而另一个通道为 G (绿色) 。
如果我们把左、右 (R 与 G) 合并,两者可以是 100% 重叠:
或 66% 重叠,可是 66% 重叠可以是图一或图二: 图一与图二是两个完全不同情况,图一的结果可以是 100% 的 G 与 R 重垒,而 66% 的 R 与 G 重叠。而图二,R 与 G 的重叠是 66%。
图一
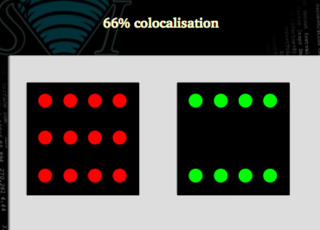
图二
所以,我们需要不同的共定位相关系数....
针对与另一通道不重叠的讯号
不受强度的改变的影响(一激光强度比另一激光强度大或小)
不受背景强度的影响
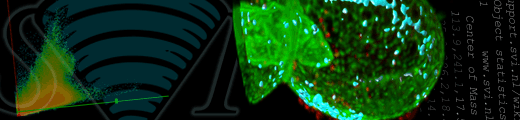
而去卷积及图像修正绝对对共定位的结果带来正面的影响:模糊、噪音、背景强度、色差及 Cross Talk 都必需先修正,再进行共定位分析。以下的图像是一个很好的例子,去卷积及图像恢复后对共定位结果的影响。图像修复前,红色讯号因模糊而与大部份绿色讯号重叠,去卷积后,两个通道之间的重叠明显减少,事实上,这个结果更有代表性。
共定位相关系数的简单定义:
*Pearson 是由數學家 Karl Perason 提出的,是统计學中最常用刭的,這個系數代表兩個螢光通道的相互关系,如果相關系數等於 1 ,代表通道之間是完全重疊;如果相关系數越接近 1,兩通道的重疊或相关程度越大。數值越小,其互相重疊的程度越小。這個數值在 -1 与 1 之间。
*Object Pearson 与 Pearson 的計算是一樣,可是在計算中,Huygens 軟件只测量强度大於背景的訊號,所以這個系數只测量物体 (Object) 本身,因此這個系數的名称为 Object Pearson。
*Spearman 這個相关系數是由 Charles Spearman 提出的,這個系數与 Pearson 系數差不多,他侦测單調函数的数据 (Monotonic),這個計算是先测量通道的强度,加以分辨:强度較大的,定義為 Rank 1,强度較弱的為 Rank 2,如此類推,再利用 Pearson 的计算方法计算出兩通道之間的相关系數。
*Object Spearman 与 Object Pearson 一樣,計算方法与 Spearman 並無太大的分別,Huygens 在测量時只测量物体 (Object),背景强度或並非物体的讯号並不包括在测量中,所以有 Object Spearman 的名稱。
*Overlap 是由 Erik Manders 提出的,代表在两个互相重叠、交叉的物体体积比例。这个相关系数只限用于物体的体积在每一个通道是一样的,而且每一通道的强度在物体中不变。
*Mander k1,k2 这个相关系数也是由 Manders 的论文中提出的,它是用来定义两个萤光通道之间的重叠、交叉关系 (例如:所有 R 讯号重叠于 G,可是不一定所有 G 讯号重叠于 R),这个系数与两个通道的强度 (total intensity) 有密切关系。
*Mander M1,M2 由以上 Mander k1,k2 系数演算而来的,这个系数分别计算两个通道重叠、交叉的部份,一个通道的与另一个通道交叉的强度。这个方法计算一个通道中带有另一个通道的体素(voxels ),而这个系数与实际数值是独立的,所以两通道之间的强度比例并不影响这个系数的结果。
*Global intersection coefficient 这是本公司提出的,Huygens 軟件獨有的共定位系数。這個方法非常直接,是交叉体積与總体積的比例。這個系數的 100 倍就是這個交叉体積的百分比。
*Per-channel i1 and i2 intersection coefficients 這個系數是基於以上 Global intersection coefficient 的系數,可是把每一個通道分割出來。它代表一通道中与另一通道中有重疊、交叉的物体体積。