Seed-and-threshold segmentation
セグメンテーションの問題は、データセットの関心のある特徴の選択を指します。 これに非常に関連するのは、ラベリングです、つまり、何か共通点がある(通常、空間で隣接している)ピクセルを単一の存在物(対象物)にグループ化します。
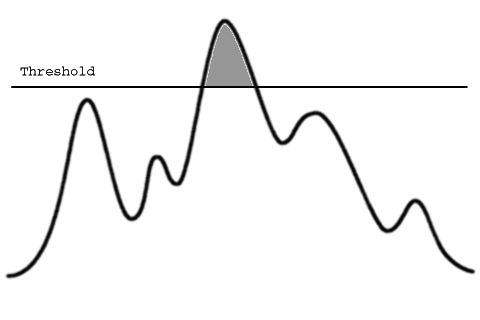
簡単にするために 1 次元の場合を考えてみましょう、しかし、これは、3D 画像にも当てはまります。 1 つの空間座標に沿って次の強度分布があるとします(これは、例えば、空間の 1 つの線に沿った 1 つの画像の強度プロファイルである可能性があります):

特徴をセグメント化するための最も簡単なアプローチは、閾値基準を適用することです: 閾値を超える強度を持つピクセルは、関心があると見なされます。 次に、隣接するピクセルをグループ化(ラベル付け)して、個別の対象物を形成できます:
ただし、この場合、選択した対象物が小さすぎます。 潜在的な解析のために、より大きな対象物を取得する必要がある場合があります。 これは、次のように閾値を下げることで実現できます:
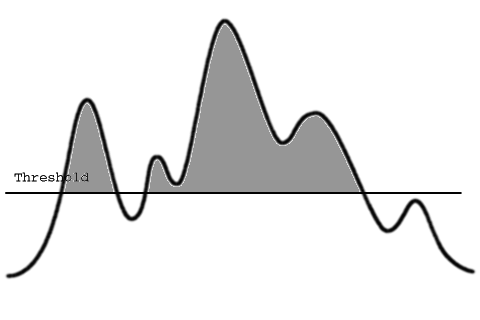
この 2 番目の閾値は、2 つの異なる対象物を定義します。 1 つは、中央に大きく(3 つのピークがある)、もう 1 つは、左側にあります(1 つのピーク)。 この閾値で定義されたこれら 2 つの対象物は、空間的に接続されていません。(閾値をもう少し下げると、2 つの領域が接続されて 1 つのマルチピーク対象物が定義されるように、選択範囲が拡張されることがわかります)。
これは、場合によっては競合する可能性があります: 大きくて機能豊富な対象物を取得するには、閾値を低くする必要がありますが、閾値を下げすぎると、望ましくない小さな対象物が選択されます。
考えられる解決策の 1 つは、シードを使用することです。 これは、二次的な閾値と見なすことができます。 最初の閾値は、データを選択し、独立した対象物を作成しますが、シードレベルを超える対象物だけが残り、残りは、破棄されます:
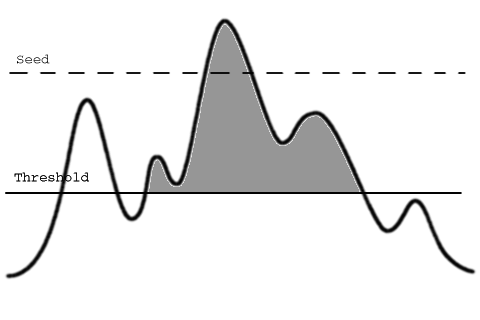
このレベルは、セグメンテーションが計算される方法から「シード」と呼ばれます: 画像は、最初にシードレベルを超える強度を持つ特徴を調べられ、次に、このシードの周りで選択範囲が拡張され、すべての隣接ボクセルが閾値まで取得されます。
このセグメンテーション手法を使用することにより、Huygens Object Analyzer は、より用途の広い方法で特徴を見つけることができます。 最も単純な閾値の動作を復元するには、シードレベルを閾値レベルと同じに設定します(シードは、閾値の 0 % です)。
このボクセル選択は、特徴検出の問題の一部にすぎません。 関心のあるボクセルが定義された後も、それらを個別の対象物にグループ化する必要があり、それには、多くの可能性があります。 蛍光顕微鏡からの画像のような 3D 分布の確固たる基準の 1 つは、1 つの面を共有する隣接するボクセルを一緒にラベル付けすることです: それらは、6 接続といわれています。 それが Object Analyzer の機能です。
ガベージボリュームを設定することで、セグメンテーションから小さな対象物を破棄することもできます。.